로볼리전트·에내틱·피엔디로보틱스 등 휴머노이드 플랫폼에 자사 로봇 핸드 장착 데모 출품
“직접 구동(DD) 기술, 개방형 인터페이스 기반 휴머노이드 연동 정밀 구동 구현해”
테솔로가 지난 5일부터 나흘간 경기 고양시 일산서구 소재 킨텍스(KINTEX)에서 열린 ‘제20회 국제로봇산업대전(이하 로보월드)’ 현장에서 미국·일본·중국 등 휴머노이드 로봇(Humanoid Robot)과의 협력 기술을 선보였다.
로보월드는 글로벌 로봇 산업의 최신 트렌드를 공유하고, 국내외 로봇 기술의 비즈니스 교류를 촉진하기 위해 기획된 전시회다.
테솔로 이번 전시부스에 자사 인간형 5지 로봇 핸드(Robot Hand) ‘델토 그리퍼-5F(Delto Gripper-5F 이하 DG-5F)’ 를 각종 휴머노이드 플랫폼에 장착한 데모를 공개했다. 이는 서로 다른 구조와 제어 시스템으로 설계한 각 로봇 기술이 단일 로봇 핸드를 통해 작동하는 모습을 구현한 모습이다. 사측은 이에 대해, 국내 로봇 그리퍼(Gripper) 및 로봇 핸드 기술의 정밀 조작 역량을 세계 시장에 각인시킨 사례라고 평가했다.
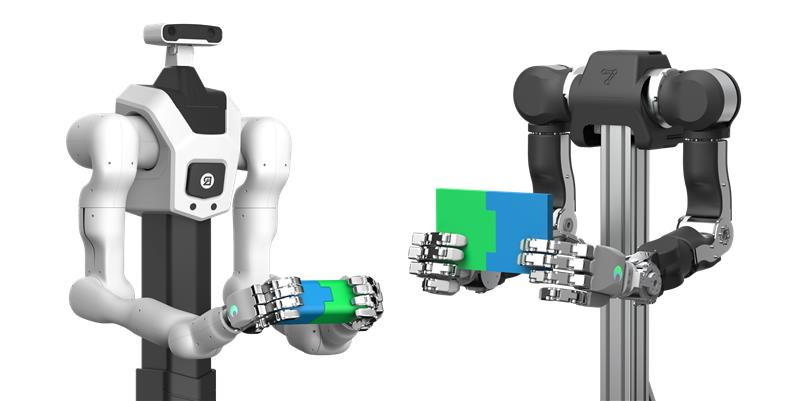
이번 통합 시연은 미국 로볼리전트, 일본 에내틱, 중국 피엔디로보틱스 등과의 협력을 통해 성사됐다. 먼저 로볼리전트는 자사 인공지능(AI) 기반 양팔형 휴머노이드 로봇 ‘로빈(ROBIN)’에 DG-5F를 장착했다.
또한 에내틱 오픈소스 기반 로봇 팔 ‘오픈암(OpenArm)’과 피엔디로보틱스 상반신 휴머노이드 플랫폼 ‘아담-유(Adam-U)’ 또한 DG-5F와 결합돼 구동 시연을 참관객에게 구현했다.
여기에 핵심적으로 활용된 DG-5F는 사람 손 구조를 모사한 다관절 로봇 핸드다. 이는 테솔로 자체 개발 고정밀 다이렉트 드라이브(Direct Drive) 구동 기술과 정밀 제어 구조를 융합한 기술로, 관절별 부드러운 동작과 유연한 파지를 지원한다. 아울러 시장 내 다양한 힘·토크 및 촉각 센서 모듈과의 호환성을 갖춘 개방형 인터페이스 구조를 채택해 다양한 휴머노이드 플랫폼과 통합 가능하다.
테솔로는 전시 현장에서 자사 로봇 팔 종단장치(EoAT) 시리즈 ‘델토 그리퍼(Delto Gripper)’ 전체 라인업을 함께 배치했다. 여기에는 2025 로보월드 어워즈(2025 Roboworld Award)를 수상한 4지 모델 ‘델토 그리퍼-4F(Delto Gripper-4F)’, 산업·연구기관용 3지 모델 ‘델토 그리퍼-3F(Delto Gripper-3F)’ 두 종, 다관절 시리즈 ‘델토 그리퍼-2F(Delto Gripper-2F)’ 및 ‘델토 그리퍼-1F(Delto Gripper-1F)’가 전시됐다.
테솔로 관계자는 “DG 시리즈는 손가락 개수와 자유도(DoF)에 따라 한 손가락부터 다섯 손가락까지 세분화된 구조를 갖추고 있다”며 “고강성·고내구성 설계를 기반으로 고속·고정밀의 안정적인 조작 성능이 내재화됐다”고 강조했다.
헬로티 최재규 기자 |